Blog
Propozycja wprowadzenia nowych podkategorii dla pojazdów wyposażonych w systemy zautomatyzowanej jazdy
W dniach od 25 do 29 września 2023 roku w Pałacu Narodów w Genewie odbyło się 17. Spotkanie Ekspertów ds. pojazdów automatycznych/autonomicznych i połączonych (GRVA). Udział w wydarzeniu wziął m.in. dr inż. Artur Gołowicz, Kierownik Pracowni Badań Dynamicznych Pojazdów Zakładu Homologacji i Badań Pojazdów w Instytucie Transportu Samochodowego – ekspert powołany przez Transportowy Dozór Techniczny i przedstawiciel Centrum Kompetencji Pojazdów Autonomicznych i Połączonych (CK:PAP). Grupa ekspertów powołana w ramach GRVA podlega pod WP.29 – Światowe Forum na rzecz Harmonizacji Przepisów Dotyczących Pojazdów (ang. World Forum for Harmonization of Vehicles Regulations).
Podczas wrześniowego spotkania omawiano m.in. kwestie związane z wdrożeniem przepisów dotyczących homologacji i badania systemów jazdy zautomatyzowanej. W związku z rozwojem takich systemów jazdy wymagane jest nowe podejście do kwestii kategoryzacji pojazdów. Podczas obrad GRVA dyskutowano o potrzebie wprowadzenia zmian w zakresie kategoryzacji pojazdów wyposażonych w systemy zautomatyzowanej jazdy ADS (ang. Automated Driving Systems). Kategorie pojazdów są zdefiniowane w R.E.3 – Ujednoliconej rezolucji w sprawie budowy pojazdów (ang. Consolidated Resolution on the Construction of Vehicles), która jest stosowana dla Państw członkowskich w ramach tzw. Porozumienia 1958 oraz w S.R.1. – Specjalnej rezolucji przyjętej przez Komitet Wykonawczy (AC.3) Porozumienia z 1998 r. (ang. Special Resolution adopted by the Executive Committee (AC.3) of the 1998 Agreement). Na obecnym poziomie prac dąży się do ujednolicenia kategoryzacji pojazdów w ramach R.E.3 i S.R.1. W tym celu eksperci z Europejskiego Stowarzyszenia Producentów Części Samochodowych CLEPA (ang. European Association of Automotive Suppliers) oraz Międzynarodowej Organizacji Producentów Pojazdów Samochodowych OICA (ang. International Organization of Motor Vehicle Manufacturers) zgłosili dokument formalny ECE/TRANS/WP.29/GRVA/2023/28 – Proposal for new vehicle subcategories for vehicles equipped with automated driving systems.
Po analizie obowiązujących przepisów propozycja została pozytywnie odebrana przez ekspertów. Stwierdzono potrzebę zastosowania nowego podejścia w celu uwzględnienia różnych przypadków używania pojazdów wyposażonych w ADS. Proponowana koncepcja kategoryzacji obejmuje zrównoważone podejście pomiędzy liczbą kategorii pojazdów zautomatyzowanych AV (ang. Automated Vehicles) a wymaganiami specyficznymi dla przypadków użycia ADS w każdym indywidualnym akcie prawnym oraz utrzymanie obecnej logiki (podstawowej kategoryzacji pojazdów). Nowa koncepcja ma umożliwić łatwe zastosowanie planowanych zmian w istniejących ramach homologacji typu całego pojazdu WVTA (ang. Whole Vehicle Type Approval).
Koncepcja wprowadzenia zmian w R.E.3 w postaci nowych podkategorii pojazdów przedstawiona jest na poniższym rysunku.
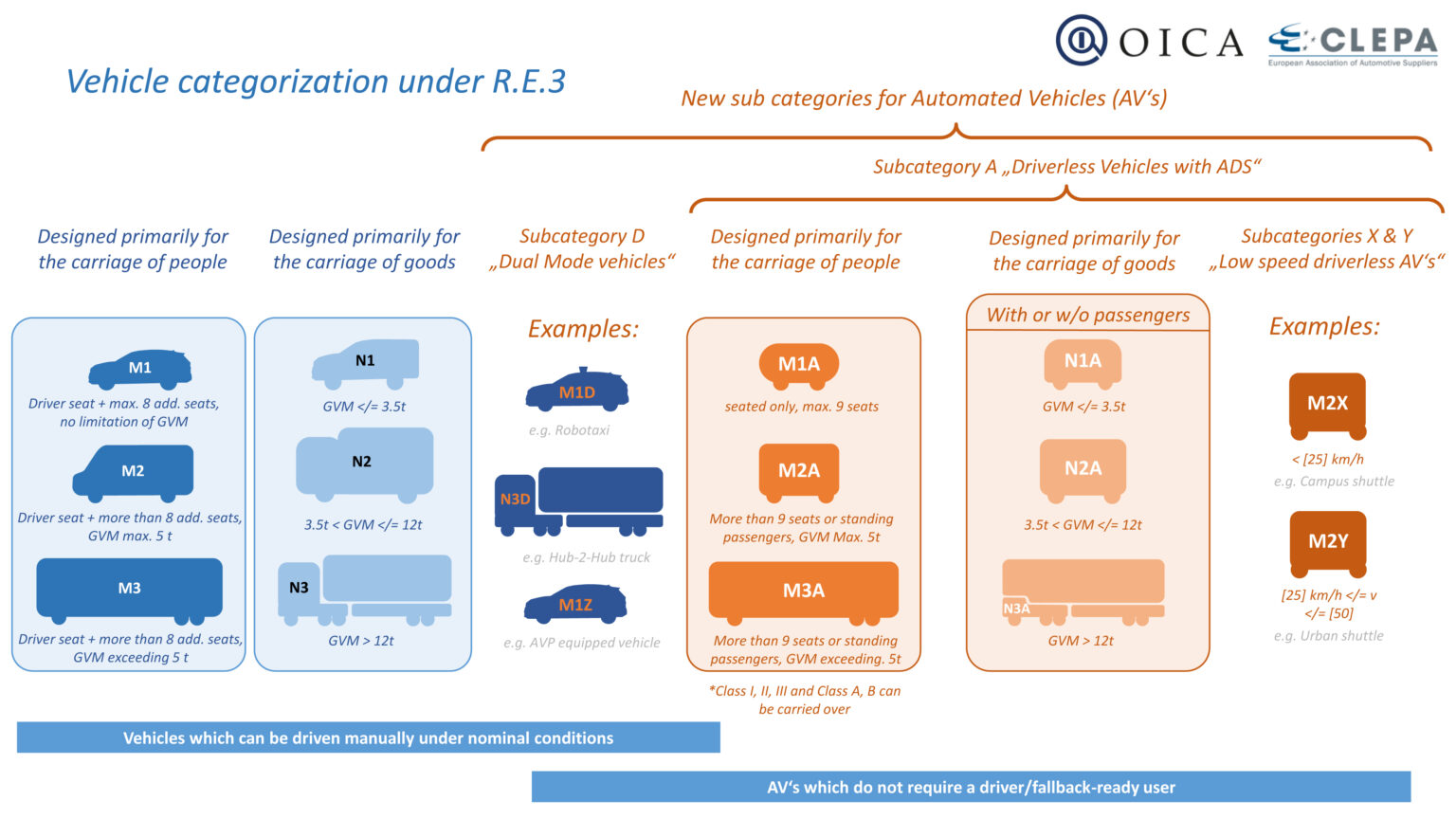
Źródło: GRVA-17-37, Dokument nieformalny przygotowany przez ekspertów z CLEPA i OICA na 17 Spotkanie Ekspertów GRVA, 25-29 września 2023 r.
Najważniejsze zmiany:
- dodano paragraf 2.10., w którym została umieszczona proponowana definicja nowej podkategorii pojazdów: „Pojazdy dwusystemowe z automatycznymi systemami jazdy”. Definicja określa pojazdy dwusystemowe jako „pojazdy kategorii M lub N [lub L], które można prowadzić ręcznie i które są wyposażone w zautomatyzowany system jazdy (ADS), nieprzeznaczony do wydawania żądań przejścia/przejęcia kontroli (umożliwiający pojazdowi jazdę w trybie zautomatyzowanym). Takie ADS nie wymagałyby interakcji kierowcy (tj. użytkownika gotowego do działania) w celu przywrócenia sterowania ręcznego”.
Proponuje się także kategoryzację pojazdów działających w trybie dwusystemowym poprzez wprowadzenie podziału na dwie podkategorie w zależności od maksymalnej prędkości dla której ma działać ADS. W przypadkach, gdy ADS umożliwia różne tryby jazdy, np. tryb jazdy z użyciem ADS przy małej i dużej prędkości, funkcja o najwyższej maksymalnej prędkości określa maksymalną prędkość zastosowania trybu jazdy z użyciem ADS i dlatego jest ona brana pod uwagę w kategoryzacji pojazdów dwusystemowych. W zależności od wielkości maksymalnej prędkości działania pojazdu z użyciem ADS proponuje się podział na:
• pojazdy podkategorii D, czyli pojazdy dwusystemowe, w których maksymalna prędkość działania z ADS przekracza 25 km/h,
• pojazdy podkategorii Z, czyli pojazdy dwusystemowe, których maksymalna prędkość działania z ADS nie przekracza 25 km/h.
Zakłada się możliwość łączenia oznaczeń. Kategorie M i N można będzie łączyć z podkategoriami D lub Z. Przykładowo pojazd kategorii M1, który nadaje się do użytku w dwóch trybach jazdy i którego maksymalna prędkość jazdy z użyciem ADS przekracza 25 km/h, należy oznaczyć jako M1D. - dodano paragraf 2.11., w którym została zaproponowana nowa podkategoria pojazdów: A – „Pojazdy bez kierowcy wyposażone w zautomatyzowane systemy jazdy”. Zdefiniowano także „pojazdy bez kierowcy”, jako „pojazdy kategorii M lub N [lub L], które są wyposażone w ADS i nie można nimi kierować ręcznie w warunkach nominalnych/nie wchodzą w zakres definicji pojazdów dwusystemowych. Zastosowany w tych pojazdach system ADS umożliwia prowadzenie pojazdu w trybie zautomatyzowanym, który nie jest przeznaczony do wydawania żądań przejścia/przejęcia kontroli i nie wymagałby interakcji kierowcy (tj. użytkownika gotowego do działania) w celu przywrócenia sterowania ręcznego”.
Zakłada się możliwość łączenia kategorii M i N z podkategorią A. Przykładowo pojazd kategorii M1, który jest uważany za pojazd autonomiczny, należy oznaczyć jako M1A. - dodano paragraf 2.12., w którym została zaproponowana nowa podkategoria pojazdów – „Pojazdy bez kierowcy, o niskiej prędkości, wyposażone w zautomatyzowane systemy jazdy” oraz podział na:
• pojazdy podkategorii X, czyli pojazdy należące do podkategorii A, ale posiadające maksymalną prędkość konstrukcyjną nieprzekraczającą 25 km/h,
• pojazdy podkategorii Y, czyli pojazdy należące do podkategorii A, posiadające maksymalną prędkość konstrukcyjną przekraczającą 25 km/h, ale nieprzekraczającą 50 km/h.
Kategorie M i N można łączyć z podkategorią X lub Y. Przykładowo pojazd kategorii M1, uznawany za wolnobieżny pojazd podkategorii Y, należy oznaczyć jako M1Y.
W celu przyjęcia zmian do R.E.3 dokument musi być zaakceptowany przez wszystkie grupy robocze w ramach WP.29. W tym celu został też zaprezentowany na 126 Spotkaniu Ekspertów ds. bezpieczeństwa ogólnego pojazdów (GRSG), które odbyło się 10-13 października 2023 r., w którym uczestniczył (jako ekspert powołany przez Transportowy Dozór Techniczny), przedstawiciel CK:PAP dr inż. Artur Gołowicz.
Źródło:
ECE/TRANS/WP.29/GRVA/2023/28 – Propozycja nowych podkategorii pojazdów dla pojazdów wyposażonych w systemy zautomatyzowanej jazdy (ang. Proposal for new vehicle subcategories for vehicles equipped with automated driving systems).
GRVA-17-37, Dokument nieformalny przygotowany przez ekspertów z CLEPA i OICA na 17 Spotkanie Ekspertów GRVA, 25-29 września 2023 r.
ECE/TRANS/WP.29/78/Rev.7 – R.E.3 – Ujednolicona rezolucja w sprawie budowy pojazdów (ang. Consolidated Resolution on the Construction of Vehicles)
TRANS/WP.29/1045 – S.R.1. – Specjalna rezolucja przyjęta przez Komitet Wykonawczy (AC.3) Porozumienia z 1998 r. (ang. Special Resolution adopted by the Executive Committee (AC.3) of the 1998 Agreement)
United Nations Economic Commission for Europe (UNECE) – unece.org
