Zestaw makiet, manekinów i system akwizycji danych pomiarowych

Statyczny manekin pieszego
Manekin prezentuje sylwetkę typowego, stojącego dorosłego pieszego. Konstrukcja manekina umożliwia założenie dowolnej odzieży na niego. Jest to warunek konieczny w przypadku chęci przebadania wpływu ubioru na rozpoznawalność pieszego przez systemy bezpieczeństwa pojazdu. Manekin został wykonany z wysokowytrzymałej pianki oraz pozbawiony został elementów twardych i sztywnych. Taka konstrukcja umożliwia zderzenie z samochodem osobowym przy prędkości nawet 60 km/h. Manekin dostarczany jest ze stabilną podstawą montażową dzięki której, możliwy jest szybki ponowny montaż po przeprowadzonej próbie zderzeniowej.
Manekin rowerzysty
Makieta 4activeBS składa się z piankowego manekina dorosłej osoby oraz roweru wykonanego z lekkiego tworzywa sztucznego. Cała makieta pozbawiona jest twardych i sztywnych elementów mogących uszkodzić karoserię badanego pojazdu. Sylwetka rowerzysty w pozycji wyprostowanej przedstawia typowego mężczyznę o wzroście 180 cm, szerokości ramion 50 cm i głębokości klatki piersiowej 23,5 cm. Maksymalna wysokość roweru wraz z rowerzystą jest to 184 cm zaś długość to 194 cm. Cała makieta jest odporna na wiatr boczny o prędkości do 4 m/s zaś w porywach nawet do 8 m/s. Urządzenie zostało tak skonstruowany, że umożliwia przeprowadzenie wielokrotnych prób zderzeniowych z samochodem osobowym do prędkości nawet 60 km/h przy zderzeniach bocznych i do 45 km/h w przypadku wzdłużnych (najechanie na rower).


Makieta pojazdu
Makieta EVT EuroNCAP Vehicle została tak zaprojektowana by dokładnie odzwierciedlać tył standardowego pojazdu. Zawiera ona dokładny obraz przedstawiający samochód osobowy ze specjalnymi elementami odblaskowymi zgodnie ze standardem ECE104, które umożliwiają poprawne rozpoznanie przy użyciu systemu LIDAR. Zastosowane materiały i powłoki sprawiają, że jest ona odpowiednia do badania wszystkich technologii wykorzystywanych w systemach wykrywania kolizji. Makieta EVT jest zgodna z oficjalnym dokumentem EuroNCAP AEB Protocol. Konstrukcja wykonana z dmuchanych elementów oraz wypełnień gąbczastych zmniejsza zagrożenie uszkodzenia karoserii pojazdu uderzającego, ponadto umożliwia ona przeprowadzenie wielokrotnych prób zderzeniowych z samochodem osobowym do prędkości nawet 50 km/h. Po uderzeniu makieta ma możliwość poruszania się po ziemi wraz z dostarczoną z nią podstawą. Urządzenie jest w pełni kompatybilne z systemem holowniczym.
System holowniczy do makiety pojazdu
Maksymalna prędkość holowania jest to 80 km/h. Cały system holowniczy składa się z:
- makiety pojazdu,
- węży gumowych φ75 mm łączonych sprzęgłem Storza,
- mobilnej podstawy makiety,
- płyty przyłączeniowej montowanej na haku pojazdu,
- mobilnych uchwytów na węże.

Do mobilnej podstawy mocowana jest makieta pojazdu przy pomocy specjalnych pasów ściskających, ponadto podstawa posiada trzy gniazda do montażu gumowych węży. Płyta przyłączeniowa montowana jest na haku pojazdu i zabezpieczana widoczną na zdjęciu dźwignią. Podobnie jak w przypadku mobilnej podstawy również dostępne są 3 gniazda przyłączeniowe do rur. Płyta wyposażona jest w zestaw trzech trójpołożeniowych rozdzielaczy pneumatycznych umożliwiających pompowanie, wypompowywanie oraz całkowite zamknięcie. Zalecane ciśnienie w układzie jest to 8 bar, które możemy sprawdzić poprzez obecny w układzie manometr. Dodatkowo płyta przyłączeniowa wyposażona jest w szybkozłącze umożliwiające podłączenie kompresora.

Statyczna makieta pojazdu
Statyczna makieta pojazdu odpowiada makiecie EVT i podobnie jak ona przedstawia tył typowego samochodu osobowego oraz jest odpowiednia do badania wszystkich technologii wykorzystywanych w systemach wykrywania kolizji. Wykonana jest z lekkich materiałów istotnie zmniejszających prawdopodobieństwo uszkodzenia pojazdu uderzającego.
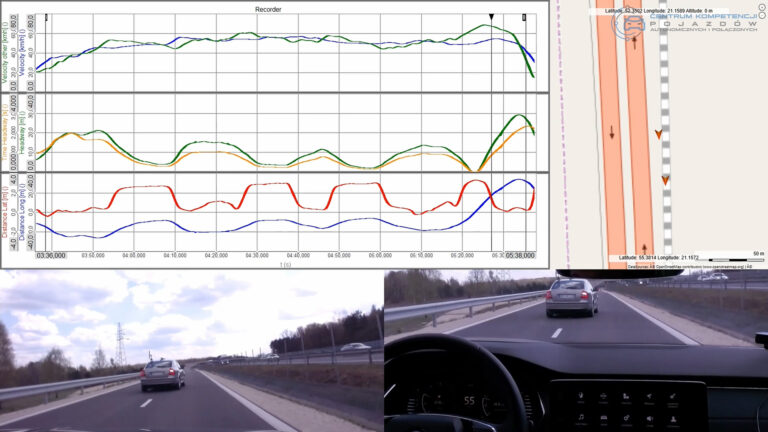
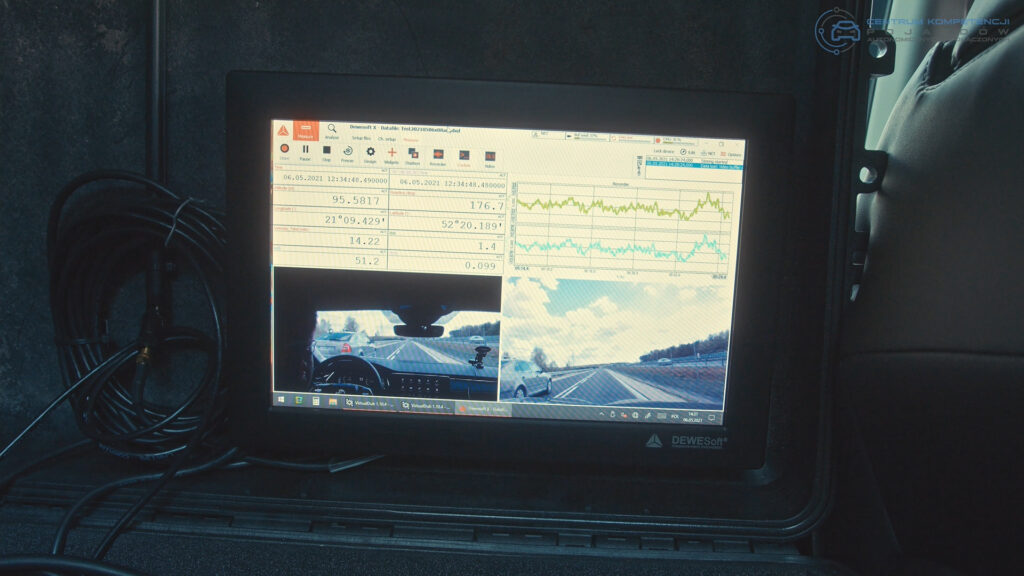
System akwizycji danych pomiarowych
System akwizycji danych pomiarowych ma na celu realizację pomiarów w badaniach reakcji systemów pojazdu. Wszystkie dane zbierane przez elementy systemu pomiarowego, w tym obraz rejestrowany w kamerach musi być możliwy do rejestracji zsynchronizowanej w rejestratorze danych. Najważniejszą cecha całego systemu jest jego integralność i możliwość pełnej synchronizacji danych pomiarowych pochodzących z czujników przyspieszenia wraz z danymi z kamer, mikrofonów i czujników lokalizacyjnych. Ponadto dzięki bezprzewodowej komunikacji między dwoma jednostkami możliwa jest również pełna synchronizacja danych z czujników pochodzących z dwóch różnych pojazdów.
Cały system składa się z:
- przenośnego komputerowego rejestratora danych,
- modułu akwizycji danych,
- dwóch mikrofonów polowych typu random-incidence,
- jednej sztuki trzyosiowego akcelerometru siedziskowego,
- dwóch sztuk akcelerometru jednoosiowego,
- czterech kamer internetowych,
- kamery do szybkiej rejestracji,
- dwóch jednostek inercyjnego pomiaru,
- dwóch modemów 3G wraz z usługą RTK.

Prócz tego zestaw zawiera też akcesoria niezbędne do użytkowania systemu, w tym urządzenia niezbędne do synchronizacji między pojazdami, oraz komplet przewodów połączeniowych. Moduł akwizycji danych jest przetwornikiem A/C wyposażonym w 8 wejść dla mikrofonów oraz akcelerometrów, ponadto wyposażony jest w dedykowany kanał wejściowy obsługujący sieć CAN w standardzie co najmniej 2.0b. Przetwornik charakteryzuje się częstotliwością próbkowania na poziomie 200 kHz w 20 bitowej rozdzielczości. Obudowa spełnia standardy wytrzymałości w warunkach polowych w wersji MIL-STD-810D.
Mikrofon polowy charakteryzuje się zakresem dynamiki od 17dB(A) do 138 dB(A) i czułości na poziomie 50 mV/Pa. Zakres częstotliwości wynosi od 4 Hz do 12,5 kHz. Urządzenie jest typu random-incidence, czyli rejestruje dźwięki docierające jednocześnie z wielu stron. Ponadto mikrofon wyposażony jest w przedwzmacniacz. Oba akcelerometry wyposażone są w piezoelektryczne sensory IEPE. Kamera internetowa rejestruje obraz w kolorze w rozdzielczości 1920 na 1080 pikseli przy 30 klatkach na sekundę z dwukanałowym dźwiękiem stereo. Zastosowana optyka zapewnia 75 stopniowy kąt widzenia oraz umożliwia wyłączenie systemu auto-focus w zadanym położeniu. Kamera do szybkiej rejestracji została wyposażona w matrycę światłoczułą typu CMOS i umożliwia nagrywanie filmów z prędkością 100 klatek na sekundę przy rozdzielczości 1920 pikseli na 1080 pikseli lub do nawet 300 klatek na sekundę przy rozdzielczości VGA (640×480 pikseli). Kamera wyposażona jest ponadto w standardowy gwint obiektywu typu C-mount oraz zapewnia 60 stopniowy kąt widzenia.
Jednostka inercyjnego pomiaru (IMU) obsługuje systemy nawigacyjne typu GPS L1, L2 i L5, GLONASS L1 i L2 oraz GALILEO E1 i E5. Urządzenie, przy wykorzystaniu metody RTK, charakteryzuje się dokładnością do 10 cm w pionie i poziomie. Jednostka obsługuje pomiar kursu z dokładnością 0,1° i umożliwia dokonanie pomiaru prędkości z dokładnością 0,007 m/s przy prędkości 200 km/h. Urządzenie wyposażone jest w akcelerometr, żyroskop oraz magnetometr i charakteryzuje się częstością odświeżania 500 Hz. Obudowa wykonana została z zapewnieniem ochrony przed pyłami i wodą na poziomie IP67 oraz spełnia standardy wytrzymałości w warunkach polowych MIL-STD-810D. Modem 3G wraz z usługą RTK-3G poprawiają dokładność pomiaru współrzędnych poprzez IMU.