Blog
3rd Seminar of the DARTS-PL Project - Summary
On June 20, 2024 at 12:00, the third seminar was held to present the results of the DARTS-PL project, entitled “Database of Autonomous vehicles Road Testing Scenarios”, financed by the National Center for Research and Development (NCBiR) under the GOSPOSTRATEG program.
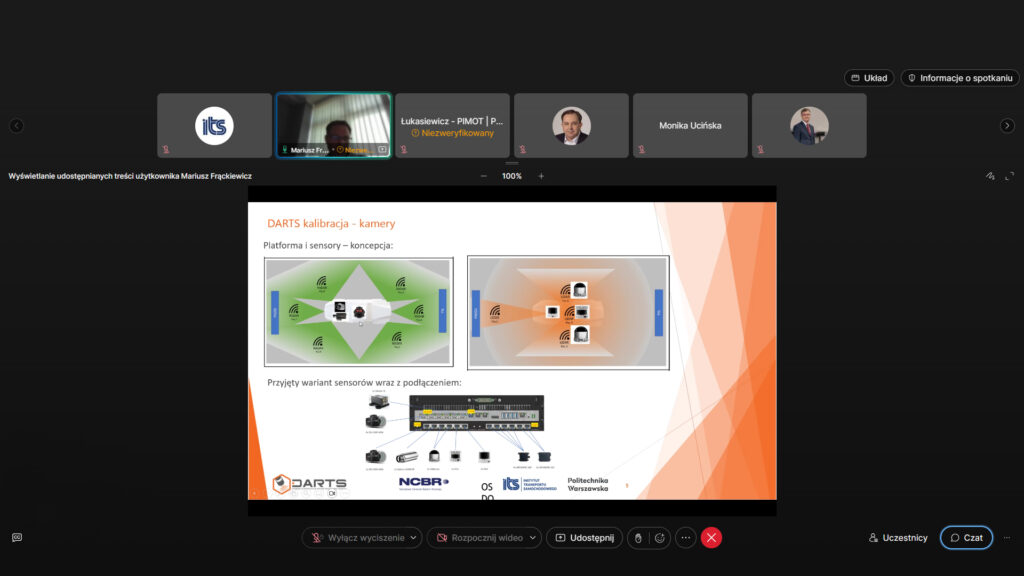
In the first speech, Mariusz Frąckiewicz, PhD Eng. (Silesian University of Technology) presented technical aspects related to the correct calibration of sensors and the assumptions and methods used to carry out these tasks. As part of the DARTS project, the platform will be equipped with various sensors, in particular cameras, lidars and radars. Each of them works based on its own coordinate system, which is additionally related to the place of physical installation on the platform. To ensure the consistency of data from individual sensors, it is necessary to perform appropriate transformations to bring different reference points to a common coordinate system, i.e. align the coordinate system of the sensors with the coordinate system of the vehicle. For the purposes of the DARTS project, the master sensor will be LiDAR 360° and it will be the reference for the other components. The main goal of calibration is to provide an accurate understanding of the vehicle’s surroundings. This can be achieved by fusion of data from multiple sensors. Aligning the coordinate systems of individual sensors with the coordinate system of the vehicle (or the adopted main sensor) will allow for precise determination of the vehicle’s position in space and the position of objects with which it may interact. Calibrated systems provide more reliable and consistent data.
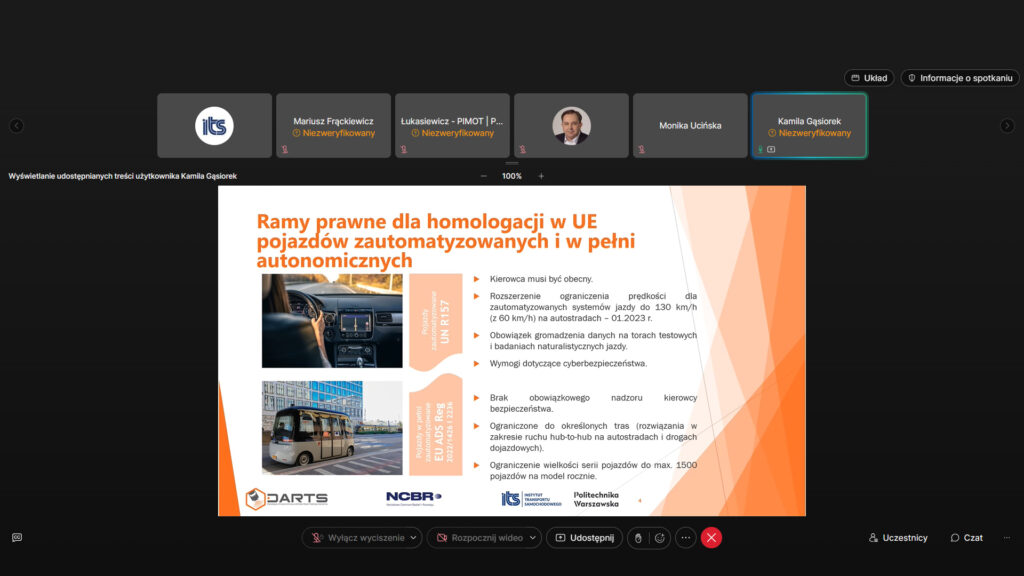
The next presentation was entitled “Selected legal regulations on autonomous driving and testing of CAVs in Europe”. An expert from the Connected and Autonomous Vehicles Competence Centre (CK:PAP), Kamila Gąsiorek, MSc. (Motor Transport Institute), gave a presentation on legal aspects, including regulatory documents, both national and international, necessary for the implementation of autonomous mobility. Autonomous vehicles are currently subject to different regulations in individual countries. The European Union is working on harmonized regulations, on unifying safety rules, in order to reduce homologation barriers (for comparison, in the United States, the principle of self-certification by the manufacturer applies). EU member states have some flexibility in implementing certain aspects of the regulations concerning autonomous vehicles in their territories. As for regulations in individual countries, many countries have already implemented their own regulations on insurance, testing and issuing permits. In most countries, e.g. Germany, France, Italy, Spain, the Netherlands, Belgium, Sweden, Austria, a requirement for a permit for testing has been introduced. Such permits are usually time-limited (e.g. 2 years).
With regard to the safety driver and remote vehicle control, most countries require a person who is able to take control of the vehicle. This person may or may not be in the vehicle (the approach varies across the EU). The requirements for the safety driver are fairly consistent across the Member States. The basic requirement is to have a driving licence corresponding to the category of vehicle being tested. In most countries, this person is required to have driving experience, on average 2 or 3 years. The safety driver must complete appropriate training provided by the test organiser. In some countries, verification of the driver’s driving history is recommended.
The EU encourages cross-border testing to accelerate the development and validation of autonomous vehicles, but this is not easy due to the lack of uniform regulations, including on testing procedures. EU law currently does not contain any binding regulations in this area. If there is a driver in the vehicle, they are responsible for road incidents. The vehicle manufacturer is responsible for technical issues. When it comes to national regulations, the most advanced are those in force in Germany. When it comes to liability, in most countries the person responsible for testing is required to conclude a civil liability agreement.
Piotr Pawlak, PhD (Motor Transport Institute), discussed numerous national and international initiatives that are being undertaken for the implementation of highly automated vehicles, both independently by individual entities and as part of project consortia, including:
- HEADSTART (Harmonised European Solutions for Testing Automated Road Transport) financed by the EU. Implementation period: 2019-2021.
- AWARD (All Weather Autonomous Real logistics operations and Demonstrations). Implementation period: 2021-2024.
- Hi-Drive (Addressing challenges toward the deployment of higher automation). Implementation period: 2021-2025.
- FAME (Framework for coordination of Automated Mobility in Europe). Implementation period: 2022-2025.
- MODI (A leap towards SAE L4 automated driving features). Implementation period: 2022-2026.
Currently, there are over 25 projects being implemented that concern the implementation of AV vehicles and address issues such as road safety, truck transport, logistics, as well as communication between vehicles, or the implementation of higher levels of automation. The DARTS project is part of this innovative trend.
The next speaker, Krystian Radlak, PhD Eng. (Warsaw University of Technology) gave a presentation entitled “Lidar data filtration”, in which he touched upon the topic of filtering and processing data intended for implementation in algorithms of autonomous vehicle perception systems.
Laser pulses sent by LiDAR are reflected from surrounding objects and returned to the sensor, which measures the return time of the reflected beam and on this basis the distance traveled is determined, and in this way the distances to individual objects are determined. There are two basic types of lidars: rotating, which emit a beam omnidirectionally (360 lidars) and solid-state lidars, which emit pulses in only one direction. The DARTS project will use both types of lidars. Unfortunately, laser beams and their reflections can be susceptible to various types of interference and environmental factors, which can adversely affect the ability to detect and precisely determine the location and size of objects. The most common interferences include strong sunlight and all types of reflections and atmospheric interference (snow, rain, fog). Lidar sensors can also interfere with each other, e.g. if there are many vehicles equipped with LiDAR sensors on the road, their lasers can interfere with each other, causing interference in the data. All types of vibrations and shocks are also unfavorable, which can cause inaccuracy in the interpretation of data.
In the DARTS project, the own data has not yet been collected, but it is planned to record the same scenarios in different weather conditions. There are two approaches to studying the impact of lidar noise in the literature: creating lidar data sets that contain naturally collected noise and creating simulation data that simulates the effect of real noise. It is assumed that the better filtering algorithm will be the one that will allow for better detection of objects on “denoised” data, and such a methodology is planned to be used in the DARTS project.
So far, two filtering algorithms have been tested in the DARTS project: 4DenoiseNet and Dynamic Statistical Outlier Removal (DSOR). The filtration results were assessed from the point of view of the effectiveness of object detection on “denoised” data compared to data without noise. The DARTS project plans to provide the user with raw data and data after filtering with selected filtering algorithms.
The special guest of the event – Mr. Piotr Mrozik (Robotec.AI) presented the advantages resulting from the use of the key product of Robotec.AI, i.e. the RGL programming library, used to simulate the operation of LiDAR devices. The most important pillars of the RGL library include: efficiency, ease of use, flexibility and versatility. The presented solution is used not only in the automotive industry. In addition, it is planned to extend the use of the RGL database to simulate the operation of other sensors – radars, which could also be helpful for the implementation of the DARTS project. At the end of the meeting, Aleksandra Rodak, MSc. Eng. (Motor Transport Institute), acting as the moderator of the seminar, invited participants to the next seminar, which is planned for October 2024 in a stationary form.
The DARTS project – Database of Autonomous vehicles Road Testing Scenarios is financed by the National Center for Research and Development under grant agreement no. GOSPOSTRATEG-VIII/0001/2022.