Blog
On March 19, 2024, the 2nd Seminar of the DARTS-PL: Database of Autonomous vehicles Road Testing Scenarios project, financed by the National Center for Research and Development (NCBiR) under the GOSPOSTRATEG program, was held. The aim of the meeting was to present the results of the activities undertaken so far by the consortium.
The first speech “Road traffic safety in the context of autonomous vehicle perception systems” presented by Kamila Gąsiorek, M.A., the expert of the Connected and Autonomous Vehicles Competence Centre (CK:PAP), explained one of the main analysis regarding road traffic safety that was carried out as part of Task I. The speaker drew attention to the fact that reliable statistical analysis of data on accidents involving AVs (Autonomous Vehicles) is difficult to obtain due to the limited availability of such data. Large-scale tests of autonomous vehicles are carried out in the United States, so the analyses was focused on this market and the data collected in US. From June 2021, the National Highway Traffic Safety Administration (NHTSA) requires vehicle manufacturers to report all types of incidents related to the malfunction of driving automation systems, and the first summary report was issued on June 15, 2022. These data and information collected by the California Department of Motor Vehicles (DMV), manager of the autonomous vehicle program and authorizing party to test AVs on public roads in California, indicate that:
- AV collisions are usually relatively minor and are most often rear-end collisions,
- most of the recorded collisions with AVs took place in urban areas, and the most common causes of these events include errors in road situation recognition systems,
- many collisions involving AVs occur due to the actions of other road users – failure to obey traffic regulations or making unexpected manoeuvres leading to an accident.
Then, situations and road conditions potentially dangerous to the proper operation of perception systems were defined, including:
- heavy road traffic making it difficult to identify signals from the surroundings and at the same time requiring quick reaction,
- road markings (areas where the marking is missing or inconsistent and illegible to the autonomous vehicle’s sensors, e.g. construction zones),
- road quality (poor technical condition, places with poor visibility, poor lighting conditions, temporary obstacles).
The next speaker, Robert Nowak, PhD. Eng. (Warsaw University of Technology), in his presentation “Data fusion from lidars and vision cameras. Point-cloud densification” discussed the operation principle of an algorithm that will be used in the DARTS-PL project. This algorithm converts data from lidars and cameras into a common space. One of the methods used for this purpose is to thicken the point cloud by creating pairs of images (stereovision) and combining several point clouds. Currently, many sensors are used in vehicles, which allows for better mapping of the environment surrounding the vehicle. Robert Nowak pointed out the importance of correct data synchronization and sensor calibration, because otherwise even the most advanced algorithm will not work correctly. Using data fusion algorithms allows to obtain and then use a more accurate, multidimensional description of the environment.
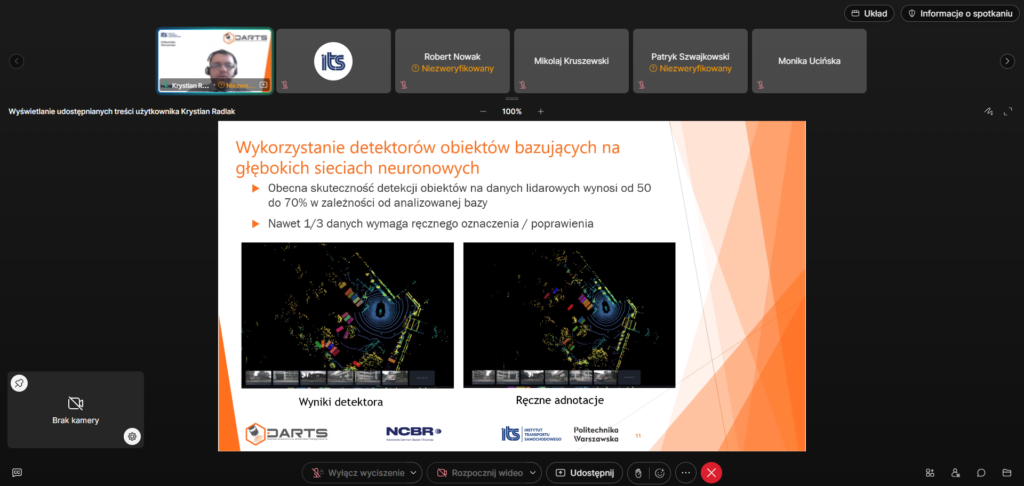
The third person to speak was Krystian Radlak, PhD Eng. (Warsaw University of Technology) with a presentation entitled “Methods for automatic annotation of lidar data“, in which he explained why automatic/semi-automatic annotation of lidar data is a serious challenge carrying great potential for the development of AV control algorithms. One of the main assumptions of the DARTS-PL project is to annotate data in a semi-automatic way, namely, first, annotations will be generated automatically, and in the second step, these annotations will be approved or corrected by specially trained annotators who will be tasked with identifying all objects in the environment. There are many tools available on the market that enable such an annotation process. As part of the DARTS-PL project, several experiments were performed with different tools to compare their effectiveness (none of the tools automatically generated pre-annotations). Some of them enabled object tracking. Analysis of 3D annotation time for various tools showed that annotating a single element takes an average of 23 seconds, annotating a single frame in a sequence takes an average of 40 minutes (large variation depending on the tool). Currently, the basic task of the DARTS-PL project is testing existing 3D object detectors (how these detectors behave on various existing databases, their effectiveness, whether they always detect the same objects). After completing the tests, selected detectors will be used on proprietary data from the DARTS-PL project. In addition to object detectors, approaches using object tracking and a fusion of both approaches are also being developed.
The special guest of the seminar, Marcin Szydełko (GlobalLogic Poland), presented the practical capabilities of the equipment, showing the actual operation of a stereoscopic camera (algorithm running on Raspberry Pi). On the screen one could observe the “cloud of points” mentioned earlier by Robert Nowak from the Warsaw University of Technology. Depending on whether the object is moving closer or further away from the camera, the colours presented on the monitor change. Installing two cameras allows to determine the depth of the image.
Marcin Szydełko’s speech “The impact of digital models on autonomous driving” drew attention to the concept of “Digital Twin”, which should be understood as a virtual model of a physical object, reflecting its behaviour and interactions with other physical objects. Digital Twins are created to simulate situations that would be too dangerous, time-consuming or too expensive to actually perform. As an example, Marcin Szydełko mentioned the company Waymo, which uses Simulation City to test and verify the operation of its algorithms in the virtual space. Summing up his statement, the GlobalLogic representative drew attention to the future of new technologies development, which is correct training data.
At the end of the meeting, Aleksandra Rodak, MSc. Eng. (Motor Transport Institute), moderator of the seminar, emphasized how important cooperation between representatives of industry and science is. Mutual communication should allow for the development of certain standards, both in terms of collecting data and examining the behaviour of road users, and this may bring mutual benefits in the future.
***
The 2nd DARTS-PL Seminar, in which the discussion focused on technical aspects and road safety in the context of autonomous vehicle perception systems, was attended by numerous representatives of scientific units, universities, research institutes and entrepreneurs involved in the production and testing of driving automation systems. In addition to following the presentations, participants also had an opportunity to exchange observations and interact in chat comments.
The DARTS project – Database of Autonomous vehicles Road Testing Scenarios is financed by the National Center for Research and Development under grant agreement no. GOSPOSTRATEG-VIII/0001/2022.